Subcircuits¶
Several circuits or systems of practical interest involve a large number of blocks (elements). In such cases, the schematic diagram can be significantly simplified using subcircuits (hierarchical blocks). In this section, we will first explain how a simple subcircuit can be designed using the schematic capture GUI. We will then look at more complex subcircuits, including an induction motor model.
Some comments about sub-circuit files are in order.
As described in the section on
Getting started,
the GSEIM distribution already has several sub-circuits,
and the concerned files are located in the
$SUBCKT and
$SUBCKT_GRC
directories. These sub-circuits can be used by the user
in a new circuit (project). In addition, the user can make
up new sub-circuits. A sub-circuit named sub1, for example,
involves three files:
sub1.grc: This file describes the schematic diagram of the sub-circuit prepared by the user.sub1.hblock.yml: This file is generated when the user openssub1.grcin the GUI and clicks on theGenerate circuit filebutton in the menu bar.sub1_parm.py: This is a python file, to be written by the user, if the sub-circuit involves computed parameters, i.e., parameters whose values need to be computed.
Of these three files, sub1.grc can be saved by the user in
a directory of their choice. The path of the other two files is
given by the value assigned to the variable
HIER_BLOCK_USER_DIR while invoking GSEIM. For example, if
the user wants to use ~/subckt_dir for saving
sub1.hblock.yml and
sub1_parm.py,
then the commands to invoke GSEIM (see
Installation Instructions)
should be modified as follows.
Pre-built image:
HIER_BLOCK_USER_DIR=~/subckt_dir/ gseim-guiBuilding from source:
HIER_BLOCK_USER_DIR=~/subckt_dir/ bazel run //grc:gseim_gui
In the following, we will denote the value assigned to HIER_BLOCK_USER_DIR
by $HIER_BLOCK_USER_DIR.
With this background, we can now discuss a few specific sub-circuits.
Linear transformation¶
Let us see how to make up a subcircuit to implement the linear transformation given by,
where \(x_1\), \(x_2\) are the input nodes (variables), and \(y_1\), \(y_2\) are the output nodes. Eq. (38) can be implemented as follows.
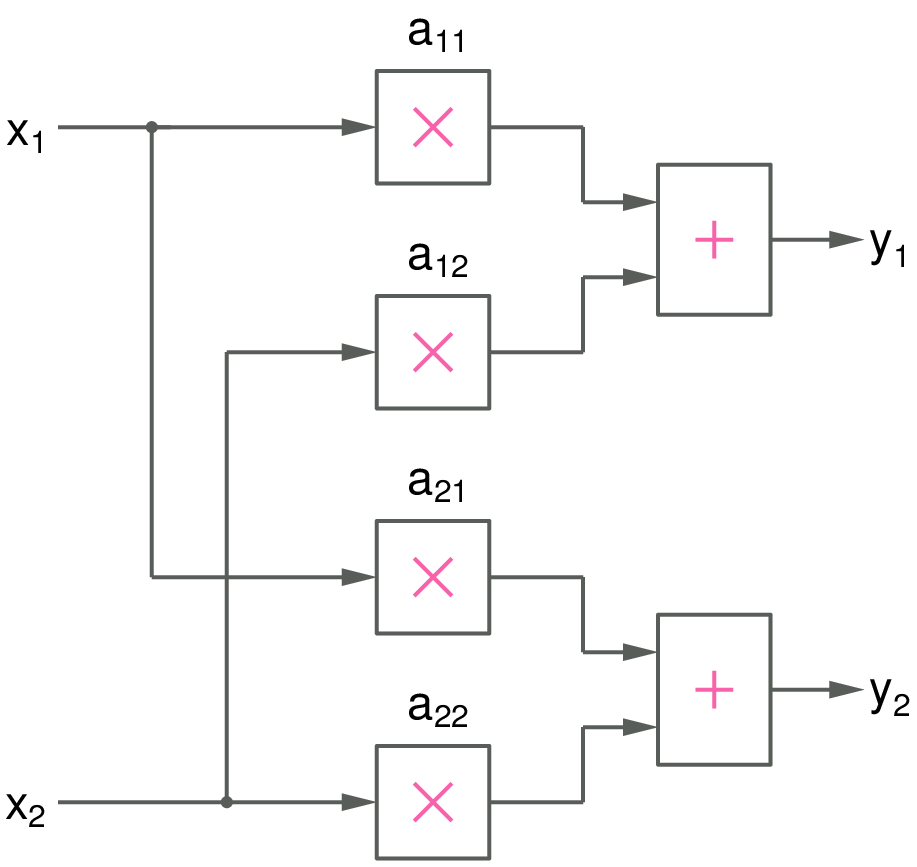
To convert this block diagram into a GSEIM subcircuit, we can use the step-by-step procedure given below.
Start a new project. A canvas with an
Optionsblock will appear. Double-click on the options block, and setIdandTitle. Note that Id should only contain letters, digits, and the underscore character. As a convention, it is a good idea to startIdwiths_(sfor subcircuit); however, it is not really required. In theGenerate optionfield, chooseHier Blockto indicate that this schematic diagram is for a hierarchical block (subcircuit) and not a stand-alone system.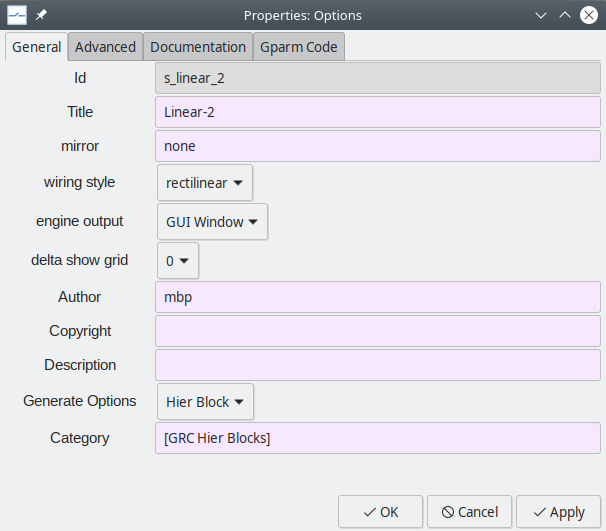
Save the subcircuit schematic. It is a good practice to use a file name which reflects the name (
Id) of the subcircuit. In our example, it would bes_linear_2.grc. Saves_linear_2.grcin a suitable directory.The next step is to bring in the required elements (blocks) from the library (see Creating a new project). We need four
multscl(multiply by scalar) elements and twosum_2elements. Place the components, keeping in mind the connections we need to make.
Next, we need to provide pads for our subcircuit. We need two source pads (for \(x_1\) and \(x_2\)) and two sink pads (for \(y_1\) and \(y_2\)). The source pads will show up as input pads when we invoke this subcircuit from a higher level; similarly, the sink pads will show up as output pads. Bring in the source and sink pads from the block tree panel \(\rightarrow\)
Misc\(\rightarrow\)subcircuit pads.Double-click on each of the source and sink pads and name those as
x1,x2,y1,y2. Assignx1to the source pad which you brought in first, andx2to the one you brought in later. Similarly, name the sink pad you brought in first asy1and the other sink pad asy2. When this procedure is followed, the subcircuit, when invoked, will have the orderx1,x2for the input nodes (ports), andy1,y2for the output nodes.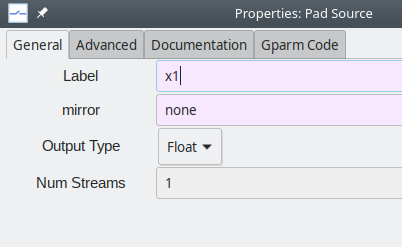
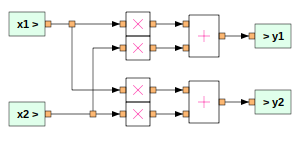
Bring in two connectors,
connector_f_3aandconnector_f_3b, and place them suitably. Your schematic should now look like this: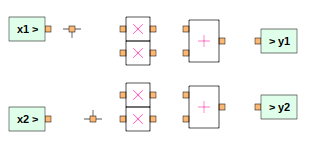
Connect the elements as required. To make a connection between two ports, click on one of the ports and then the other.
Our next step is to assign the multiplier parameter (
k) of eachmultsclelement the values shown below.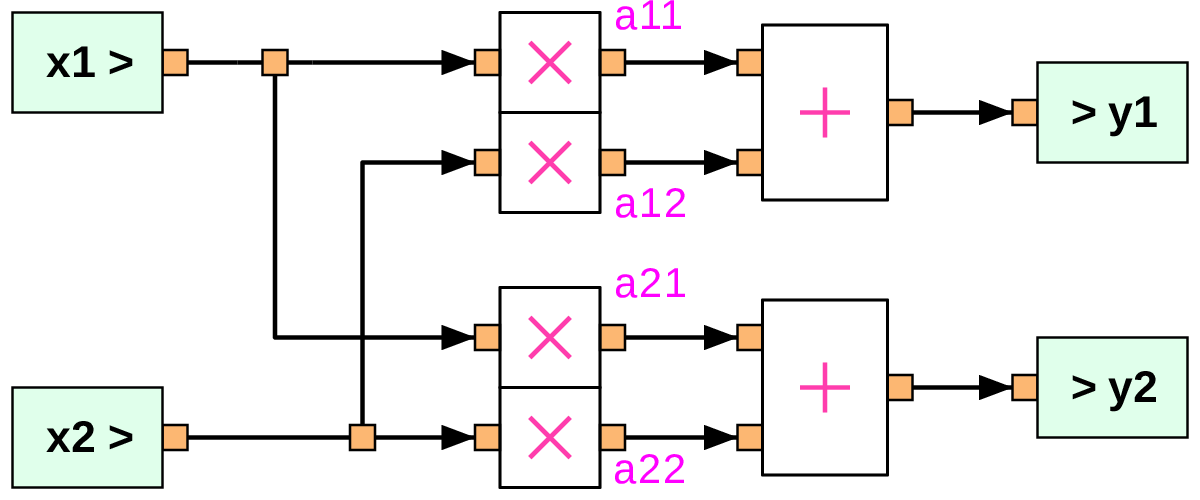
Note that we will need to make
a11,a12,a21,a22assignable when this subcircuit is invoked. This is achieved with the help of global parameters. Click onGParms\(\rightarrow\)Add gparm, and change the name as shown below.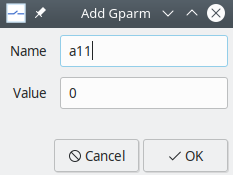
Repeat for
a12,a21,a22.We now map the global parameters to the
kparameters of themultsclelements. Double-click on the topmultsclelement in the schematic and assigna11tok. Similarly, make suitable assignments for the other threemultsclelements.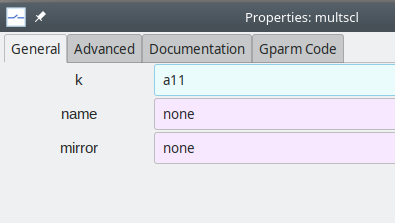
Click on
Generate circuit file. This creates a file$HIER_BLOCK_USER_DIR/s_linear_2.hblock.yml, a text file which can be opened with a text editor such asvim,emacs,gedit. Notice that the.grcfile to which we have saved the schematic appears in thegrc_sourcefield ins_linear_2.hblock.yml.End your GSEIM session and start it again. You will find the newly added subcircuit listed under
GRC Hier Blocks. Note that the label which appears in this list (s_linear_2) corresponds to theIdvalue we entered in theOptionsblock earlier.Drag and drop the subcircuit into the canvas.
Hovering over a port displays the name of that port. By convention, ports corresponding to
pad_sourceblocks in the subcircuit schematic (x1andx2in our case) appear on the left of the subcircuit symbol, and those corresponding topad_sinkblocks (y1andy2in our case) appear on the right, as shown below.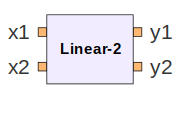
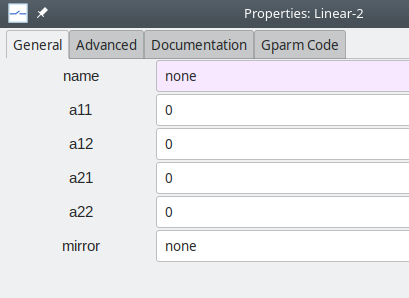
Double-clicking on the subcircuit opens the following dialog box, enabling the user to edit the parameter values as required.
Induction motor¶
We now consider the induction motor model described in Element Templates. The model equations are reproduced below.
where
with
We first rewrite Eqs. (39) to (43) such that each of them can be implemented using basic blocks such as adder, multiplier, integrator, etc.
As an example, Eq. (41) can be rewritten as,
which can be implemented using the mult_2 element (to multiply \(\omega _{rm}\) and
\(\psi _{qr}\)), and the sum\_2 and integrator elements described in
Element Templates.
Treating
Eqs. (39) to (43)
in this manner, we obtain the subciruit shown below
(the .grc file is
~/gseim_grc/subckt_grc/s_indmc.grc).
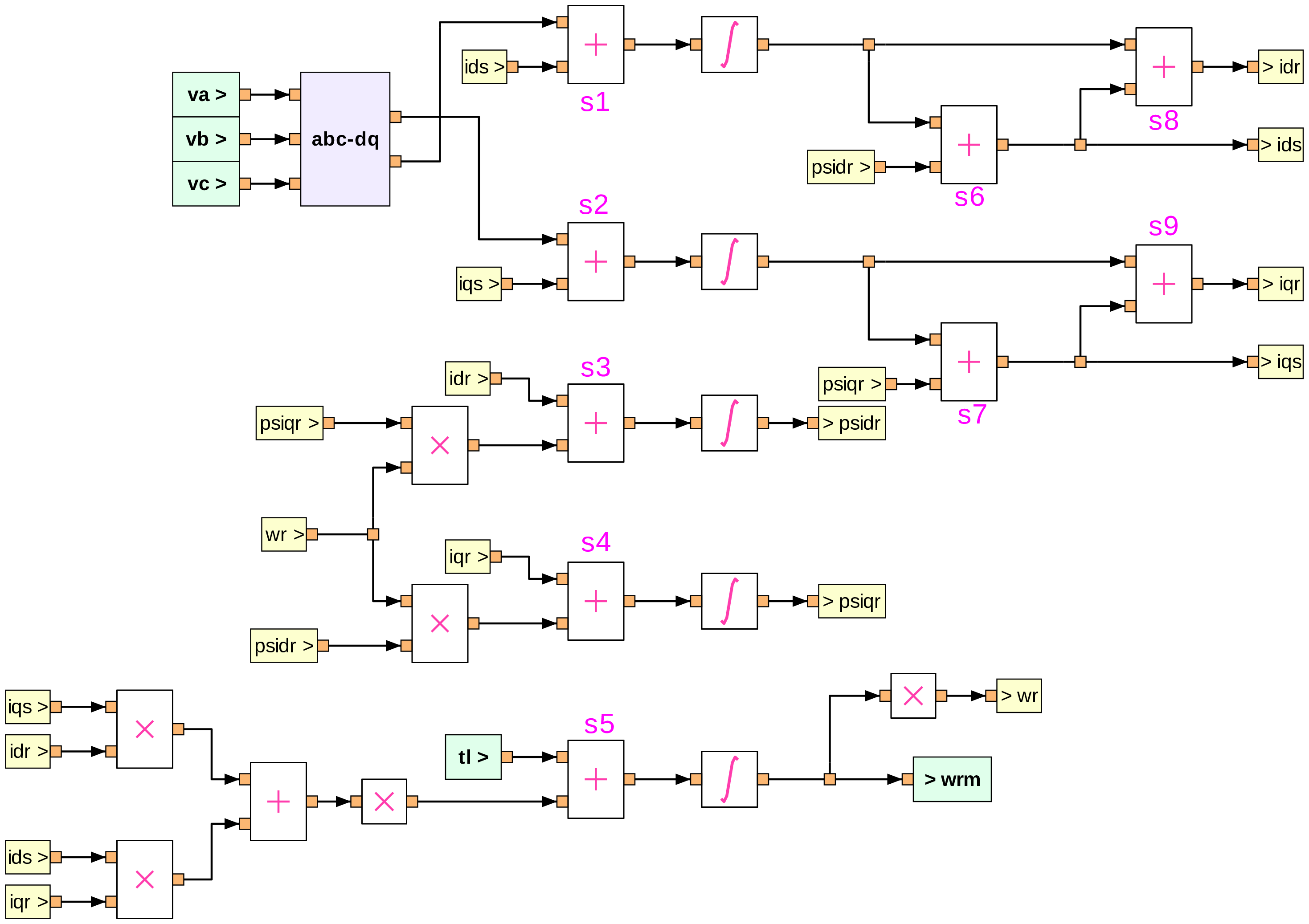
The following additional points about the implementation may be noted:
Virtual (dummy) sources and sinks (shown in light yellow colour) are used in order to make wiring less cumbersome. For example, note the virtual sink marked
>idrand the virtual source markedidr>, the two corresponding to the same node.Input and output pads (shown in light green colour) are used to indicate the input and output ports of the subcircuit symbol when it is invoked from a higher level. For the induction machine subcircuit,
va,vb,vc,tlare the input ports, andwrmis the output port. When the subcircuit is invoked, the input ports appear on the left, and the output ports on the right, as shown below.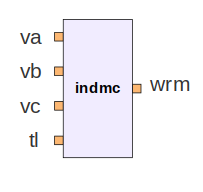
The subcircuit has the following parameters:
j,llr,lls,lm,poles,rr,rs, which correspond to \(J\), \(L_{lr}\), \(L_{ls}\), \(L_m\), \(P\), \(r_r\), \(r_s\), respectively, in Eqs. (39) to (43). In implementing the equations, we need to compute quantities which depend on these parameters. For example, consider Eq. (44) for \(i_{ds}\), implemented using thesum\_2element marked ass6in the figure. This element gives\[i_{ds} = k_1\psi _{ds} + k_2\psi _{dr},\]which requires \(k_1 = \displaystyle\frac{L_r}{L_mL_e}\), \(k_2 = -\,\displaystyle\frac{1}{L_e}\) to be assigned. For all such assignments, the user is expected to supply a python file specific to the concerned subcircuit, and it needs to be in the same directory as the
.ymlfile for that subcircuit. Fors_indmc, the python file is~/gseim_grc/subckt/s_indmc_parm.py, and is reproduced below.1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66
def s_indmc_parm(dict1): j = float(dict1['j' ]) llr = float(dict1['llr' ]) lls = float(dict1['lls' ]) lm = float(dict1['lm' ]) rr = float(dict1['rr' ]) rs = float(dict1['rs' ]) poles = float(dict1['poles']) ls = lls + lm lr = llr + lm le = (ls*lr/lm) - lm l1 = lr/(lm*le) l2 = 1.0 + (lls/lm) l3 = lls/lm x1 = 0.75*poles*lm x2 = 0.5*poles i1_k = 1.0/j s1_k1 = 1.0 s1_k2 = -rs s2_k1 = 1.0 s2_k2 = -rs s3_k1 = -rr s3_k2 = -1.0 s4_k1 = -rr s4_k2 = 1.0 s6_k1 = l1 s6_k2 = -1.0/le s7_k1 = l1 s7_k2 = -1.0/le s8_k1 = 1.0/lm s8_k2 = -l2 s9_k1 = 1.0/lm s9_k2 = -l2 m1_k = x1 dict1['i1_k' ] = '%14.7e' % (i1_k ) dict1['s1_k1'] = '%14.7e' % (s1_k1) dict1['s1_k2'] = '%14.7e' % (s1_k2) dict1['s2_k1'] = '%14.7e' % (s2_k1) dict1['s2_k2'] = '%14.7e' % (s2_k2) dict1['s3_k1'] = '%14.7e' % (s3_k1) dict1['s3_k2'] = '%14.7e' % (s3_k2) dict1['s4_k1'] = '%14.7e' % (s4_k1) dict1['s4_k2'] = '%14.7e' % (s4_k2) dict1['s6_k1'] = '%14.7e' % (s6_k1) dict1['s6_k2'] = '%14.7e' % (s6_k2) dict1['s7_k1'] = '%14.7e' % (s7_k1) dict1['s7_k2'] = '%14.7e' % (s7_k2) dict1['s8_k1'] = '%14.7e' % (s8_k1) dict1['s8_k2'] = '%14.7e' % (s8_k2) dict1['s9_k1'] = '%14.7e' % (s9_k1) dict1['s9_k2'] = '%14.7e' % (s9_k2) dict1['m1_k' ] = '%14.7e' % (m1_k ) dict1['x2' ] = '%14.7e' % (x2 )
The
k1andk2values for thesum_2element marked ass6in the schematic are computed in the above python function ass6_k1ands6_k2, respectively. At the end of the function, all of these computed values are stored in the parameter dictionary for this subcircuit. With this mechanism, the user has significant flexibility in implementing element equations.The user can define
output parametersfor a subcircuit and use those at higher levels. The output parameters can be mapped to nodes within the subcircuit or to the output parameters of the blocks involved in the subcircuit. These features provide a mechanism for viewing various quantities of interest at different levels when the system is simulated.
Voltage source inverter¶
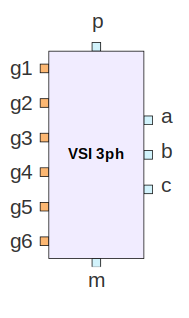
Next, we consider a subcircuit with electrical elements, viz., a three-phase voltage source inverter. The GSEIM implementation is shown below.

When the subcircuit is called from a higher level, it appears as follows.